在数值分析和泛函分析领域中,离散小波变换(Discrete Wavelet Transform,DWT)是小波被离散采样的小波变换。与其他小波变换一样,它与傅里叶变换相比的一个关键优势是时间分辨率:它既能捕获频率信息,又能捕获位置(时间上的位置)信息。
第一个离散小波变换由匈牙利数学家哈尔发明,离散小波变换顾名思义就是离散的输入以及离散的输出,但是这里并没有一个简单而明确的公式来表示输入及输出的关系,只能以阶层式架构来表示。
- 首先我们定义一些需要用到的信号及滤波器。
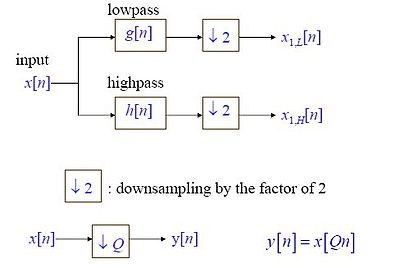
- x[n]:离散的输入信号,长度为N。
![{\displaystyle g[n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3c5e1d771a2385e9aeb71838a40425bb07c89525) :低通滤波器(low pass filter),可以将输入信号的高频部分滤掉而输出低频部分。
:低通滤波器(low pass filter),可以将输入信号的高频部分滤掉而输出低频部分。![{\displaystyle h[n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/89981bbbb05ffd469eeadb828c18359965985e46) :高通滤波器(high pass filter),与低通滤波器相反,滤掉低频部分而输出高频部分。
:高通滤波器(high pass filter),与低通滤波器相反,滤掉低频部分而输出高频部分。 Q:降采样滤波器(downsampling filter),如果以x[n]作为输入,则输出y[n]=x[Qn]。此处举例Q=2。
Q:降采样滤波器(downsampling filter),如果以x[n]作为输入,则输出y[n]=x[Qn]。此处举例Q=2。
- 举例说明:
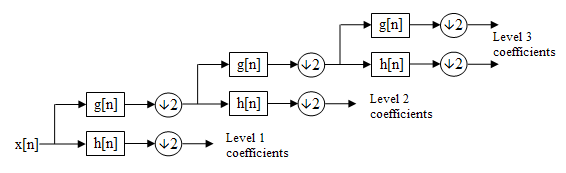
- 清楚规定以上符号之后,便可以利用阶层架构来介绍如何将一个离散信号作离散小波变换:

- 架构中的第1层(1st stage)
![{\displaystyle x_{1,L}[n]=\sum _{k=0}^{K-1}x[2n-k]g[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e89171201a089a787ca8eecf3cfcc0a997ca2687)
![{\displaystyle x_{1,H}[n]=\sum _{k=0}^{K-1}x[2n-k]h[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1f25f3aaaa0a147dc3d27be4ffa8ec69966f512b)
- 架构中的第2层(2nd stage)
![{\displaystyle x_{2,L}[n]=\sum _{k=0}^{K-1}x_{1,L}[2n-k]g[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/778ad7dd66c5fb41a730549fa7a229eb16187cbf)
![{\displaystyle x_{2,H}[n]=\sum _{k=0}^{K-1}x_{1,L}[2n-k]h[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a655d7ed52b22f9cdddc4212e23b84da4fd260f1)
- 可继续延伸

架构中的第 层(
层( stage)
stage)
![{\displaystyle x_{\alpha ,L}[n]=\sum _{k=0}^{K-1}x_{\alpha -1,L}[2n-k]g[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8b3237f86646ab171917e1d6fbab78eb53ad7496)
![{\displaystyle x_{\alpha ,H}[n]=\sum _{k=0}^{K-1}x_{\alpha -1,L}[2n-k]h[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/36145d18b7c0b1f46f34d3321d019964fb06b9c6)
注意:若输入信号![{\displaystyle x[n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/864cbbefbdcb55af4d9390911de1bf70167c4a3d) 的长度是N,则第层中的 的长度是N,则第层中的![{\displaystyle x_{\alpha ,L}[n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bee354c65204f381107da41675caf54fdd0f8af0) 及 及![{\displaystyle x_{\alpha ,H}[n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a985602660a89b0b360223e0d07cd3e8c522b0c8) 的长度为 的长度为 |
|

- 此时的输入信号变成
![{\displaystyle x[m,n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9745486e9c980ded7be564ca034810c0502193a5) ,而变换过程变得更复杂,说明如下:
,而变换过程变得更复杂,说明如下:
- 首先对n方向作高通、低通以及降频的处理
![{\displaystyle v_{1,L}[m,n]=\sum _{k=0}^{K-1}x[m,2n-k]g[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3bb581d19be3dc84b6f66476669af51bb565f115)
![{\displaystyle v_{1,H}[m,n]=\sum _{k=0}^{K-1}x[m,2n-k]h[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/adf51b66814e213300e947da548d3bdc2d77c4ea)
- 接着对
![{\displaystyle v_{1,L}[m,n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d2c2f9e57456cfe1f1bb72f65e453ddcd3e328b6) 与
与![{\displaystyle v_{1,H}[m,n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c6aaed46292fa3e843bdcc62f065f819508c5965) 延著m方向作高低通及降频动作
延著m方向作高低通及降频动作
![{\displaystyle x_{1,LL}[m,n]=\sum _{k=0}^{K-1}v_{1,L}[2m-k,n]g[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5699b1611ae488b196dfeb4b12a5ffbe17a7b756)
![{\displaystyle x_{1,HL}[m,n]=\sum _{k=0}^{K-1}v_{1,L}[2m-k,n]h[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d1bc0b122f88e2ec5cd699913f5291c491ac9a9f)
![{\displaystyle x_{1,LH}[m,n]=\sum _{k=0}^{K-1}v_{1,H}[2m-k,n]g[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6657c6da1e42df215ace930f89aae0da4fa6b5f6)
![{\displaystyle x_{1,HH}[m,n]=\sum _{k=0}^{K-1}v_{1,H}[2m-k,n]h[k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f960b7f056492a876a7b6cc969b6cefa847de992)
- 经过(1)(2)两个步骤才算完成2-D DWT的一个stage。
以下根据上述2-D DWT的步骤,对一张影像作二维离散小波变换(2D Discrete Wavelet Transform)
- 原始影像

- 2D DWT的结果



在讨论复杂度之前,先做一些定义,当x[n]*y[n]时,x[n]之长度为N,y[n]之长度为L:
![{\displaystyle \ \Rightarrow IDFT_{N+L-1}\left[DFT_{N+L-1}(x[n])DFT_{N+L-1}(y[n])\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cae7432bf7923ce1cc5af75a0704bf6f899b83d8)
其中,
 为(N+L-1)点离散傅里叶逆变换(inverse discrete Fourier transform)
为(N+L-1)点离散傅里叶逆变换(inverse discrete Fourier transform)
 为(N+L-1)点离散傅里叶变换(discrete Fourier transform)
为(N+L-1)点离散傅里叶变换(discrete Fourier transform)
(1)一维离散小波变换之复杂度(没有分段卷积(sectioned convolution)):

(2)当 N >>> L 时,使用 “分段卷积(sectioned convolution)”的技巧:
将x[n]切成很多段,每段长度为 ,总共会有
,总共会有 段,其中
段,其中 。
。
则
![{\displaystyle \ x[n]*g[n]=x_{1}[n]*g[n]+x_{2}[n]*g[n]+...+x_{s}[n]*g[n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/386358bc19aaec9a2e9d9ce37fd38aa709fc9a2b)
![{\displaystyle \ x[n]*h[n]=x_{1}[n]*h[n]+x_{2}[n]*h[n]+...+x_{s}[n]*h[n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/18d1b64eae8d11bb27fd38ae196e928c6af7c1bc)
复杂度为:

在这里要注意的是,当N>>L时,一维离散小波变换之复杂度是呈线性的(随N), 。
。
(3)多层(Multiple stages )的情况下:
1.若![{\displaystyle \ x_{a,H}[n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b0225fcdc0e72f90971baf21dbd5818de5e9789f) 不再分解时:
不再分解时:

2.若也细分时:

(4)二维离散小波变换之复杂度(没有分段卷积(sectioned convolution)):

上式中,第一部分需要M个一维离散小波变换并且每个一维离散小波变换的输入有N个点;第二部分需要N+L-1个一维离散小波变换并且每个一维离散小波变换的输入有M个点。

(5)二维离散小波变换之复杂度,使用 “分段卷积(sectioned convolution)”的技巧:
假设原始尺寸为 ,则每一小部分的尺寸为
,则每一小部分的尺寸为

所以若是使用分段卷积,则二维离散小波变换之复杂度是呈线性的(随MN), 。
。
(6)多层(Multiple stages )与二维的情况下:
首先x[m,n]的尺寸为,
1.若![{\displaystyle \ x_{a,H_{1}}[n],x_{a,H_{2}}[n],x_{a,H_{3}}[n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0249304ddc40b1198b08d4b65deb69fc6119787e) 不细分,只细分
不细分,只细分![{\displaystyle \ x_{a,L}[n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/11c7a580e0467ccd1a109d8d7862ff79c29cd707) 时,总复杂度为:
时,总复杂度为:

2.若也细分时,总复杂度为:
![{\displaystyle {\begin{aligned}totalcomplexity&=\left(MN+4{\frac {M}{2}}{\frac {N}{2}}+16{\frac {M}{4}}{\frac {N}{4}}+...\right){\frac {3}{2}}\log _{2}M_{1}N_{1}\\&=\left[MN\log _{2}(min(M,N))\right]{\frac {3}{2}}\log _{2}M_{1}N_{1}\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5b65707e601992cb38fc9457a407d6032250f84c)
使用离散小波变换,将信号个别通过一个低通滤波器和一个高通滤波器,得到信号的高低频成分,而在重建(Reconstruction)原始信号的过程,也就是离散小波的逆变换(Inverse Discrete Wavelet Transform. IDWT),直观而言,我们仅是需要将离散小波变换做重建滤波即可得到原始输入信号,以下将推导重建滤波器,也就是IDWT高低通滤波器的构成要件,以及如何来重建原始信号。
使用Z变换:

- DWT低通滤波器
 的Z变换为
的Z变换为  ,DWT高通滤波器
,DWT高通滤波器 的Z变换为
的Z变换为
- 信号
 通过滤波器 后,Z变换为
通过滤波器 后,Z变换为  ,信号通过滤波器 后,Z变换为
,信号通过滤波器 后,Z变换为
![{\displaystyle X_{1,L}(z)={\frac {1}{2}}[X(z^{\frac {1}{2}})G(z^{\frac {1}{2}})+X(-z^{\frac {1}{2}})G(-z^{\frac {1}{2}})]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e1a5ca6b242399e9142d1785f12bed631cf884fa)
![{\displaystyle X_{1,H}(z)={\frac {1}{2}}[X(z^{\frac {1}{2}})H(z^{\frac {1}{2}})+X(-z^{\frac {1}{2}})H(-z^{\frac {1}{2}})]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/23fed8fd5871ec0be7b67dab6e1aa1f4e99825e5)
- 升频(interpolation)2倍后,再通过IDWT的低通重建滤波器
 ,
,
![{\displaystyle X_{0}(z)={\tfrac {1}{2}}[X(z)G(z)+X(-z)G(-z)]G_{1}(z)+{\tfrac {1}{2}}[X(z)H(z)+X(-z)H(-z)]H_{1}(z)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a41efe9f8250241456370898ec832227ac1daa37)
![{\displaystyle ={\tfrac {1}{2}}[G(z)G_{1}(z)+H(z)H_{1}(z)]X(z)+{\tfrac {1}{2}}[G(-z)G_{1}(z)+H(-z)H_{1}(z)]X(-z)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/53e7e0658a6da7ce7db107825eec36ddcd52b0b3)
若要完整重建,则
條件1:
條件2:
因此,在设计高低通重建滤波器时,需要考虑上述条件,写成矩阵形式如下:

其中 
1.DWT通滤波器 ,必须要是有限长度。
2.满足是高通滤波器(high pass filter),是低通滤波器(low pass filter)。
3.满足完整重建要条件,,其中
4.若,为有限长度,则 ,且
,且  为奇数。
为奇数。
*为什么k是奇数?
假设k为偶数,
z=-1

z=1



代回

显然出现矛盾。
所以k必须为奇数。
1.正交镜象滤波器(Quadrature Mirror Filter,QMF)







 ,且 为奇数。
,且 为奇数。
2.单位正交小波(Orthonormal Wavelet)






,且 为奇数。
多数小波属于单位正交小波。
压缩、去除噪声:使用低通滤波器,将小波变换的高频滤掉,即保留![{\displaystyle x_{1,LL}[m,n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0d8608023ad34350b051b07146e3fcab335cc9cd) 而将其他部分舍弃。
而将其他部分舍弃。
- 边缘侦测:使用高通滤波器,将小波的低频滤掉,即保留
![{\displaystyle x_{1,HL}[m,n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a9430d219a31ca6aec8230eb6d60ad8b972e2bf0) 或
或![{\displaystyle x_{1,LH}[m,n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1a3c4a90c743b8f13b8c816d232197ab3884689b) 而舍弃其他部分。
而舍弃其他部分。
- R语言小波分析wavelet (页面存档备份,存于互联网档案馆)
- 作为 JPEG2000 的内部架构
- 模式辨认:由于可以利用低频的部分得到原图的缩略版,加上模式通常为整体的特性,借由在缩略图上进行工作,小波变换可以有效减少寻找模式与比对模式的运算时间
- 滤波器设计:小波变换保留部分时间信息,可以据此信息加上信号的强度信息,保留特定时点的信息而同时去除噪声






